
这个变体可以与PPM-SUM接收器一起使用。
与PWM不同,它会将所有通道一个接一个地发送在一根线上。
电压控制模式是默认使用。
CONTROL_PPM_RIGHT 是用于右侧传感器电缆,并默认设置以限制噪声,因为该电缆较短。
如果您需要使用左侧传感器电缆,您可以使用CONTROL_PPM_LEFT。
DEBUG_SERIAL 将在另一个电缆上自动启用。
PPM_NUM_CHANNELS 是PPM的通道数, 默认为6。 例如,即使使用6通道发射器,Flysky fs-i6ab接收器也会发送8个通道。
请同时检查所有变体共有的参数。
将接收器VCC连接到编程端口的3.3v,或从霍尔传感器电缆或电压调节器获取5v。
⚠️ 传感器电缆的红色电线提供15伏电压!!!
将接收器的PPM端连接到右侧传感器电缆(较短)上的绿色电线
将接收器连接到接地。
⚠️ 在某些电路板上,黑色电线是15伏!!!用万用表检查,确保15伏和接地没有互换。
随着速度/负载的增加,PPM信号中可能会有很多噪声,从而触发不需要的动作:
保持电缆短,使用屏蔽电缆,使用铁氧体磁珠,稳定电压
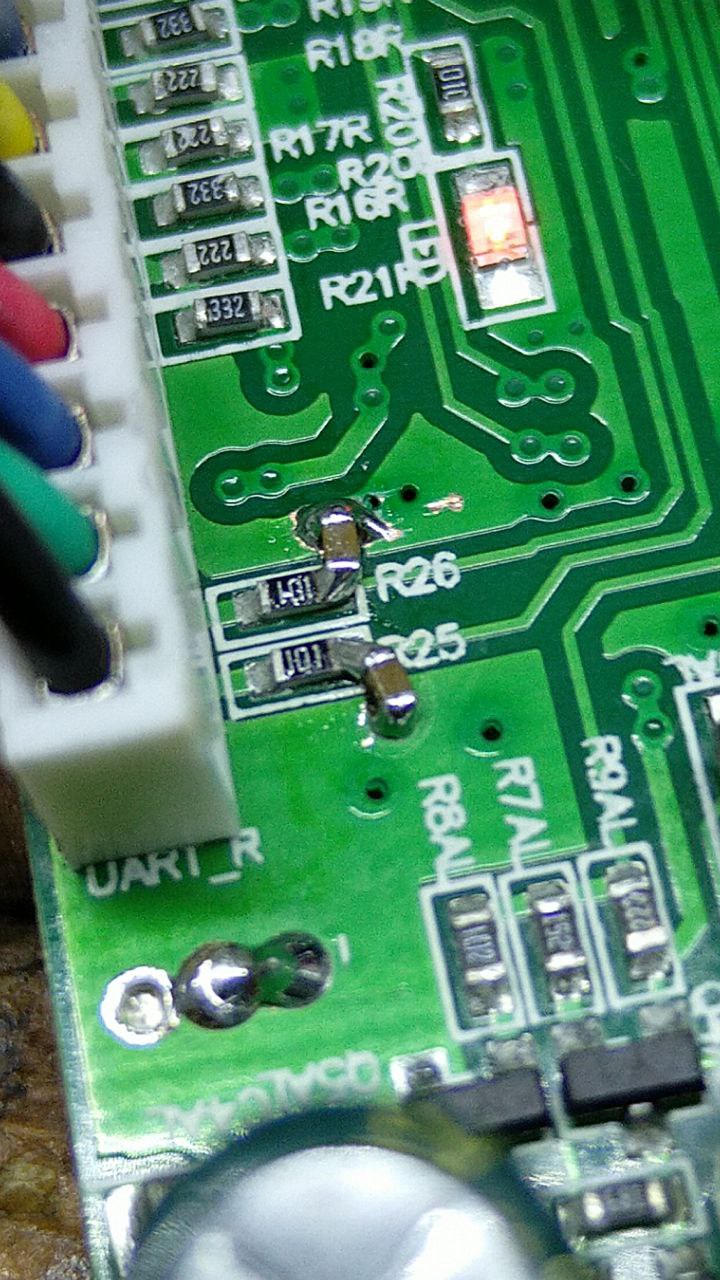
你可以刮花印刷电路板并焊接100nf电容器到地,这将作为一个RC滤波器并减少信号噪声
启用PPM
将所需的操纵杆分配到通道1(转向)和通道2(油门)。
进行校准以获得更好的控制。
这个变体使用了死区参数来防止由于噪声而在0输入周围产生抖动。
如果电路板发出蜂鸣声
检查通道数量,即使您的发射器只处理6个通道,您的接收器可能会传输更多的通道。
确保你在你的遥控器上启用了PPM。
确保您使用接收器上的PPM端口
确保您使用了在config.h中选择的传感器电缆(左=CONTROL_PPM_LEFT或右=CONTROL_PPM_RIGHT)。
在某些板子上,线的颜色可能会有所不同,尝试使用蓝色的线。
您可能有MCU输入故障、缺少101表面贴装电阻器或电阻值过高的情况(例如问题),您可以配置固件使其在另一条电缆上工作
如果你遇到不需要的动作,请检查接线部分。
这个变体可以与脉冲宽度调制接收器一起使用。 它期望从两个通道接收每秒50次的1毫秒到2毫秒的脉冲。
电压控制模式是默认使用。
CONTROL_PWM_RIGHT用于右侧传感器电缆,并默认设置以限制噪声,因为该电缆较短。
如果您需要使用左侧传感器电缆,您可以使用CONTROL_PWM_LEFT代替。
DEBUG_SERIAL将在另一侧电缆上自动启用。
请同时检查所有变体共有的参数。
将接收器VCC连接到编程端口的3.3v,或从霍尔传感器电缆或电压调节器获取5v。
⚠️ 传感器电缆的红色电线提供15伏电压!!!
将接收器的通道1(转向)连接到配置文件config.h中选择的电缆的蓝色线,将通道2(速度)连接到绿色线。
将接收器连接到接地。
⚠️ 在某些电路板上,黑色电线是15伏!!!用万用表检查,确保15伏和接地没有互换。
随着速度/负载的增加,PWM信号中可能会有很多噪声,从而触发不需要的动作:
保持电缆短,使用屏蔽电缆,使用铁氧体磁珠,稳定电压
你可以刮花印刷电路板并焊接100nf电容器到地,这将作为一个RC滤波器并减少信号噪声
将所需的操纵杆分配到通道1(转向)和通道2(油门)。
继续进行校准以获得更好的控制。
这个变体使用了死区参数来防止由于噪声而在0输入周围产生抖动。
如果电路板发出蜂鸣声
确保您使用了在config.h中选择的传感器电缆(左=CONTROL_PWM_LEFT或右=CONTROL_PWM_RIGHT)。
您可能有MCU输入故障、缺少101表面贴装电阻器或电阻值过高的情况(例如问题),您可以配置固件使其在另一条电缆上工作
发表评论